
Como funciona a autoguiagem?
Primeiros passos com PHD Guiding
Push Here, Dummy: os primeiros passos na utilização do software de autoguiagem, com o exemplo do programa PHD Guiding.
 Fotografias com tempos de exposição demasiado curtos: telescópio com equipamento de autoguiagem em ação. Mario Weigand
Fotografias com tempos de exposição demasiado curtos: telescópio com equipamento de autoguiagem em ação. Mario Weigand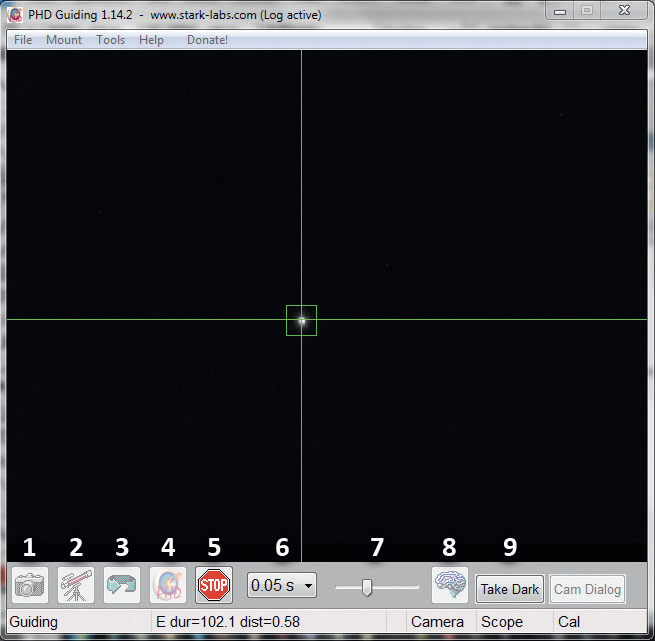 Fig. 2: Janela principal do PHD com as funções importantes. Mario Weigand
Fig. 2: Janela principal do PHD com as funções importantes. Mario WeigandNeste artigo, são abordados os primeiros passos referentes à utilização do software de autoguiagem. Neste, o programa PHD Guiding oferece uma solução gratuita (Push Here, Dummy), com a promessa de ser particularmente fácil de utilizar. São suportadas praticamente todas as câmaras de seguimento estabelecidas.
O programa está organizado de forma clara, o que permite uma fácil iniciação ao tema. Após o arranque, é exibida a janela do programa: as configurações básicas podem ser acedidas através do menu “Standard”. Por baixo do mesmo, estão a imagem atual da câmara e a barra de controlo com as funções mais importantes. A janela do programa termina na parte inferior, com uma barra de estado que exibe mensagens importantes.
Configurações de base
Na primeira utilização, têm de ser estabelecidas as ligações necessárias para a autoguiagem e a montagem. É importante que o PC ou a autoguiagem comunique diretamente com a montagem através da ligação ST-4. Neste último caso, a opção “OnCamera” tem de ser selecionada no menu, em “Mount”. Caso seja utilizada uma montagem sem interface ST-4 e apenas com interface de série (RS-232), o comando é efetuado através do controlador ASCOM.
1. Estabelecer a ligação
Através das teclas 1 e 2, são estabelecidas (nesta ordem) as ligações à câmara de seguimento ou à montagem. No caso de uma ligação ASCOM, é aberta a janela de diálogo correspondente.
2. Preparar a autoguiagem
Com a ligação estabelecida, o foco da autoguiagem é o primeiro passo da preparação do sistema. Aqui, pode ser útil aumentar o tempo de exposição para cinco segundos, de modo que até mesmo as estrelas fortemente desfocadas se tornem visíveis. De seguida, no modo “Loop” (tecla 3), é possível alcançar gradualmente a posição de foco. Através de uma marcação da posição de foco no focador, este processo pode ser efetuado de forma mais rápida nas próximas vezes.
Para o modo de seguimento, são úteis tempos de exposição de aproximadamente um segundo. Uma estrela polar adequada não pode ser demasiado ténue, mas também não pode estar demasiado exposta. A seleção é efetuada manualmente, bastando clicar na estrela pretendida. De seguida, é exibido um valor S/N na barra de estado, que ajuda a avaliar a estrela polar. Este valor indica o quão bem a estrela se destaca do ruído de fundo. São recomendados valores iguais ou superiores a 4,0. Se não estiver disponível uma estrela polar adequada, o campo de visão pode ser ajustado, utilizando as braçadeiras para tubos guia, um excêntrico ou a guia fora do eixo.
Uma vez encontrado o ajuste correto, deve ser captada uma dark frame com uma tampa na abertura da ótica de seguimento (tecla 9), de modo a corrigir os píxeis quentes. Por conseguinte, a dark frame é automaticamente deduzida de cada imagem subsequente. Se o tempo de exposição for alterado, tem de ser capturada uma nova dark frame. Se algo falhar durante a captura, a dark frame pode ser apagada através do menu “Tools/Erase Dark”.
3. Calibração
Antes de ser possível iniciar a correção de seguimento, é necessário calibrar a autoguiagem. Isto significa que o PHD tem de ser programado quanto à forma e intensidade de resposta da montagem aos comandos de controlo. Se o modo “Loop” ainda estiver ativo, este é terminado agora. Ao clicar em seguida na tecla 4, o PHD Guiding inicia a calibração. Os sinais de comando são enviados sequencialmente para os dois eixos e é possível observar como a estrela polar se move lentamente.
Nas configurações (tecla 8), é possível otimizar a calibração para a distância focal de seguimento utilizada, através do parâmetro “Calibration step”. Para distâncias focais de 500 mm, por ex., são recomendados 1000 ms; para distâncias focais longas, de aprox. 2000 mm, são recomendáveis incrementos de calibração mais curtos de 250 ms.
Se a calibração for bem-sucedida, o programa prossegue imediatamente com o seguimento. É exibida em seguida a mensagem “Guiding” na barra de estado e a marcação da estrela está a verde.
4. Processo de autoguiagem e ajustes precisos
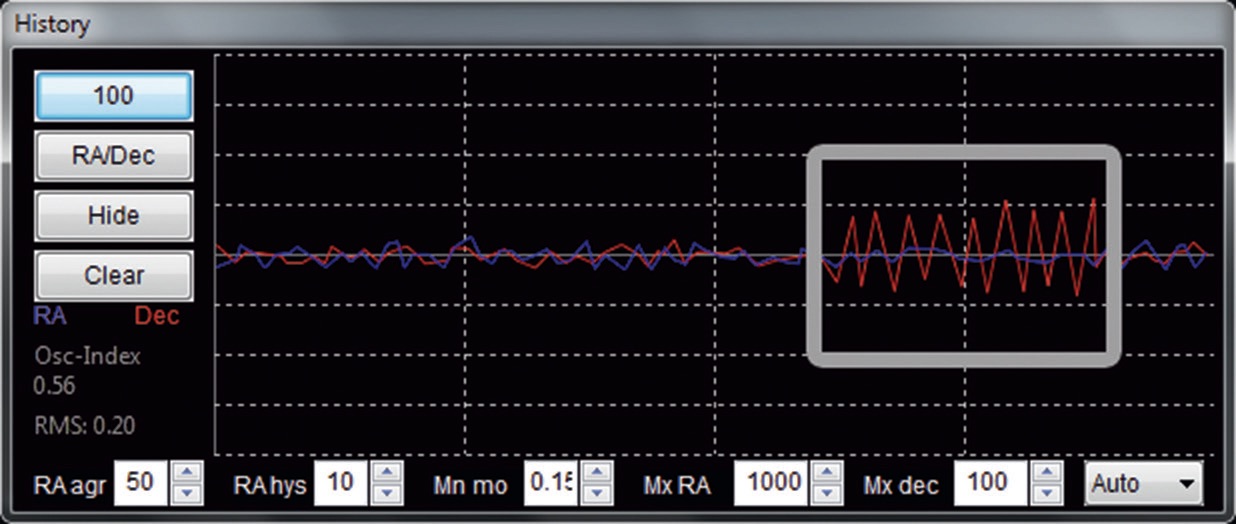 Fig. 3: Gráfico de erros com seguimento calmo. A secção à direita indica uma vibração na declinação devido à agressividade ajustada num valor demasiado alto. Mario Weigand
Fig. 3: Gráfico de erros com seguimento calmo. A secção à direita indica uma vibração na declinação devido à agressividade ajustada num valor demasiado alto. Mario WeigandO funcionamento do seguimento pode ser controlado com os gráficos de erros, que podem ser acedidos através do menu “Tools/Enable Graph”. Um gráfico azul e um vermelho representam os desvios na ascensão reta e na declinação.
Possíveis problemas:
O programa pode eventualmente perder o seguimento de estrelas polares pouco luminosas. Isto pode ser identificado através de uma marcação amarela da estrela. Neste caso, apenas uma estrela polar mais brilhante, um tempo de exposição mais longo ou o parâmetro “Noise reduction” (ver abaixo) podem ajudar.
Se a correção de seguimento não funcionar corretamente, a estrela afastar-se-á da posição nominal ao longo do tempo. Esta situação pode ser identificada no PHD Guiding através de uma mensagem de aviso vermelha.
Uma causa comum para tal é uma má ligação do cabo à montagem ou uma folga excessiva.
Além disso, existem alguns parâmetros importantes — que podem ser acedidos através da tecla 8 — que influenciam a qualidade da correção de seguimento. É importante referir que não existem parâmetros universalmente corretos. É necessário perceber quais são as configurações ideais para cada telescópio, individualmente. As seguintes sugestões podem ajudar:
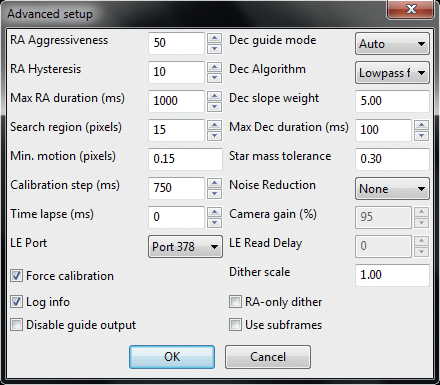 Fig. 4: Janela das configurações avançadas. Mario Weigand
Fig. 4: Janela das configurações avançadas. Mario WeigandRA Aggressiveness:
A agressividade é uma medida que corresponde à intensidade com que o programa deve responder a um erro de seguimento. Para uma otimização, deve-se observar o gráfico de erros. Se a agressividade estiver configurada num valor demasiado baixo, o guia demora demasiado tempo a recentrar a estrela polar após um erro de seguimento. O valor deve então ser aumentado em incrementos de dez. Por outro lado, se o valor configurado for demasiado elevado, existe um controlo excessivo — por isso, a estrela “oscila” em torno da posição nominal (cf. Fig. 3). Contudo, aqui, deve ser tida em consideração a interação com a histerese descrita abaixo!
RA Hysteresis:
A histerese é um limiar de resposta. Aqui, pode ser alterado o menor valor de erro a partir do qual a correção deve ser efetuada. Se o limiar for demasiado baixo, o sistema Guiding responde a flutuações relacionadas com as condições de “seeing”, o que pode resultar num controlo excessivo, tal como na agressividade. Este valor também é otimizado em incrementos de dez.
Noise reduction:
No caso de estrelas polares pouco luminosas, é possível recorrer ao binning de píxeis. Podem ser combinados 2×2 ou 3×3 píxeis, de forma a melhorar o valor S/N. Contudo, a resolução é reduzida em simultâneo. No entanto, com um tubo guia de distância focal muito curta, a qualidade da correção de seguimento pode piorar, devido ao binning de píxeis. Importante: se esta configuração for alterada, é necessária uma nova dark frame! No que diz respeito aos restantes parâmetros, as configurações de base não são, por norma, alteradas. Estão assim reunidas todas as condições para captar uma astrofotografia de longa exposição e com o seguimento perfeito!
Autor: Mario Weigand / Licença: Oculum-Verlag GmbH