
Comment fonctionne l’autoguidage ?
Premiers pas avec PHD Guiding
Push Here, Dummy : (guidage pour les nuls) premiers pas avec un logiciel d’autoguidage, en prenant l’exemple du programme PHD Guiding.
 Des images parfaitement exposées, en toute certitude : télescope avec équipement d’autoguidage en action. Mario Weigand
Des images parfaitement exposées, en toute certitude : télescope avec équipement d’autoguidage en action. Mario Weigand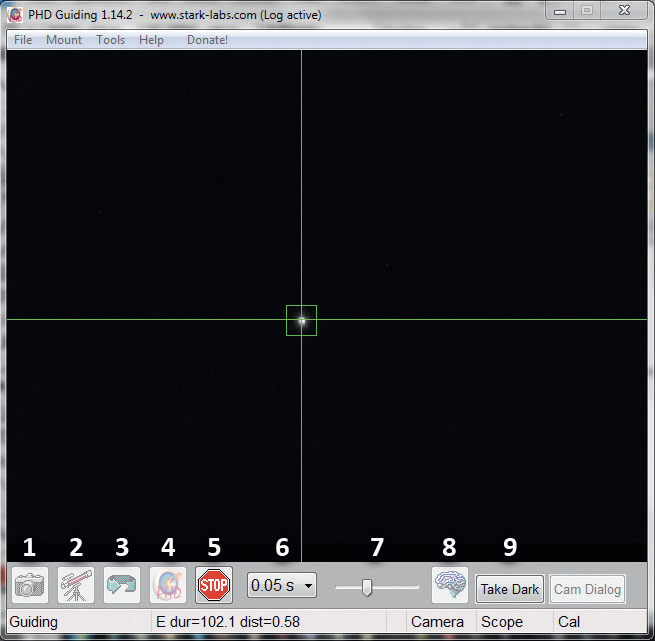 Fig. 2 : fenêtre principale de PHD avec les fonctions importantes. Mario Weigand
Fig. 2 : fenêtre principale de PHD avec les fonctions importantes. Mario WeigandCet article traite des premiers pas avec un logiciel d’autoguidage. Le programme PHD Guiding (Push Here, Dummy) propose une solution gratuite à ces fins. Ce programme revendique d’être particulièrement facile à utiliser. Il admet pratiquement toutes les caméras de suivi bien établies sur le marché.
L’interface du programme est claire et elle permet ainsi de débuter facilement dans l’autoguidage. Au démarrage, la fenêtre du programme apparaît : on peut accéder aux réglages de base via le menu standard. Au-dessous apparaît l’image actuelle de la caméra et, enfin, la barre de commande comportant les fonctions les plus importantes. La fenêtre du programme se termine, en bas, par une barre d’état qui affiche d’importants messages.
Réglages préliminaires
Lorsque l’on utilise le programme pour la première fois, il est nécessaire de procéder aux connexions nécessaires avec l’autoguider et la monture. À cet égard, il est important de décider si le PC ou l’autoguider communiquera directement avec la monture via le port ST-4. Dans ce dernier cas, il faut choisir l’option « OnCamera » dans le menu, à la rubrique « Mount » (monture). Si l’on utilise une monture sans interface ST-4, mais seulement avec interface série (RS-232), la commande est assurée à l’aide du driver ASCOM.
1. Établir la connexion
Les touches 1 et 2, actionnées dans cet ordre, permettent d’établir les connexions avec la caméra de suivi ou la monture. Dans le cas d’une connexion ASCOM, la fenêtre de dialogue correspondante s’ouvre.
2. Préparer l’autoguider
La connexion étant établie, la première étape de préparation du système consiste à la mise au point l’autoguider. À ces fins, il peut être judicieux de porter le temps d’exposition à cinq secondes afin que même des étoiles fortement défocalisées soient visibles. Ensuite, en mode Loop (touche 3), on règle par impulsions la position de mise au point. Un repérage de la position de mise au point, sur le porte-oculaire, permet d’accélérer ce processus les fois suivantes.
Pour le suivi, des temps d’exposition d’une seconde sont judicieux. Une étoile guide ne doit pas être trop faible mais elle ne doit pas non plus être surexposée. Manuellement, la sélection s’effectue par simple clic sur l’étoile souhaitée. Sur la barre d’état, il s’affiche alors une valeur S/N qui aide à évaluer l’étoile guide. Elle indique dans quelle mesure l’étoile se détache du bruit de fond. Une valeur de 4,0 ou plus est à conseiller. Si l’on ne dispose pas d’une étoile guide appropriée, on peut régler le champ de vision via des colliers pour lunettes guides, un excentrique ou l’Off-Axis-Guider.
Une fois que le réglage correct a été trouvé, il faut également réaliser un dark frame (image sur fond noir), le couvercle étant placé sur l’ouverture de l’optique de suivi (touche 9), afin de corriger les pixels chauds. Le dark frame sera ensuite automatiquement retiré de chaque nouvelle image. Si l’on modifie le temps d’exposition, il faudra alors créer un nouveau dark frame. Si quelque-chose ne se passe pas bien à ce moment-là, il est possible de supprimer le dark frame défectueux via le menu « Tools/Erase Dark ».
3. Calibrage
Avant de pouvoir commencer la correction du suivi, il faut calibrer l’autoguider. Cela signifie qu’il faut apprendre au PHD Guiding comment et dans quelles proportions la monture réagit aux ordres de commande. Si le mode Loop est encore actif, il faut maintenant y mettre fin. Un clic sur la touche 4 permet ensuite au PHD Guiding de commencer le calibrage. Des signaux de commande sont successivement émis dans les deux axes et l’on peut observer le lent déplacement de l’étoile guide.
Le calibrage peut être optimisé pour la distance focale de suivi utilisée, à l’aide du paramètre « Calibration step », dans les réglages (touche 8). Pour 500 mm, 1 000 ms sont par exemple judicieux, tandis que des incréments de calibrage plus courts, de 250 ms, sont conseillés pour de longues distances focales, de 2 000 mm environ.
Si le calibrage s’est correctement déroulé, le programme passe immédiatement au suivi. Dans la barre d’état apparaît alors le message « Guiding » et le symbole de l’étoile est vert.
4. Processus d’autoguidage et réglages précis
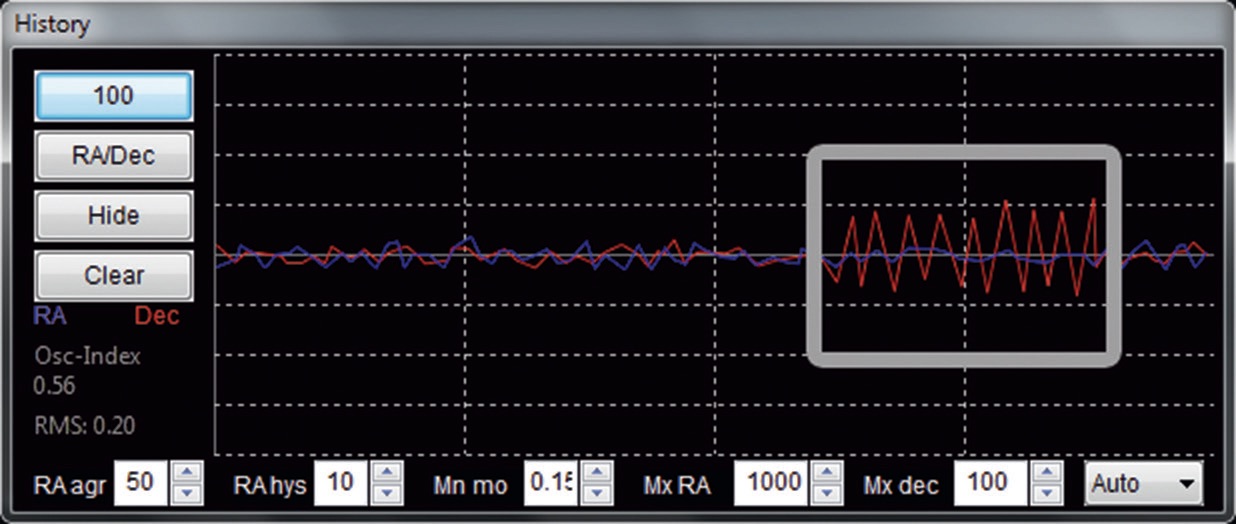 Fig. 3 : diagramme d’erreurs avec suivi non perturbé. La section à droite montre une oscillation en déclinaison due à une dynamique réglée trop haute. Mario Weigand
Fig. 3 : diagramme d’erreurs avec suivi non perturbé. La section à droite montre une oscillation en déclinaison due à une dynamique réglée trop haute. Mario WeigandLe fonctionnement du suivi peut être vérifié à l’aide des diagrammes d’erreurs qui sont accessibles via le menu « Tools/Enable Graph ». Un graphique bleu et un graphique rouge représentent les écarts en ascension droite et en déclinaison.
Problèmes possibles :
Il peut arriver que le programme perde des étoiles guides de faible magnitude, à un moment ou à un autre. On s’en aperçoit au symbole de l’étoile qui devient jaune. Les seuls remèdes sont ici une étoile guide plus lumineuse, un temps d’exposition plus long ou le paramètre « Noise reduction » (réduction de bruit). Voir plus bas.
Si la correction du suivi ne fonctionne pas correctement, l’étoile s’éloigne, avec le temps, de la position de référence. PHD Guiding le signale par un message d’avertissement rouge.
Une cause fréquente en est une mauvaise connexion, par câble, avec la monture, ou un jeu trop important de la transmission.
Il existe en outre certains paramètres importants, accessibles via la touche 8, qui influencent la qualité de la correction du suivi. Il faut dire, à cet égard, qu’il n’existe pas de paramètres universellement corrects. Il faut trouver les réglages optimaux individuellement pour chaque télescope. Les consignes suivantes peuvent apporter une aide :
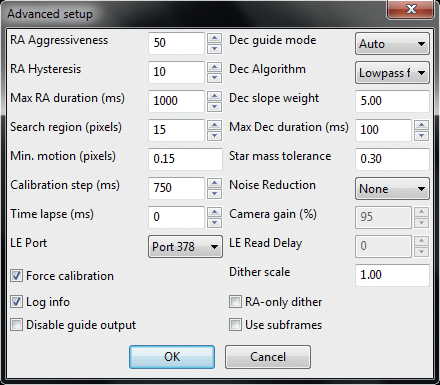 Fig. 4 : fenêtre pour les réglages avancés. Mario Weigand
Fig. 4 : fenêtre pour les réglages avancés. Mario WeigandDynamique en AD :
La dynamique est le rapport de correction appliqué par le programme à une erreur de suivi. Pour une optimisation, on observe le diagramme d’erreurs. Si la dynamique a été réglée trop faible, il faut trop longtemps à l’autoguider pour recentrer l’étoile guide après une erreur de suivi. Il faut alors augmenter la valeur par incréments de dix. Si la valeur a été réglée trop élevée, on observe en revanche une correction excessive (Over shoot). L’étoile « oscille » ainsi autour de la position cible (voir Fig. 3). Il faut toutefois prendre en compte, ici, l’interaction avec l’hystérésis décrite ci-après !
Hystérésis de AD :
L’hystérésis est un seuil de réaction. La plus petite valeur d’erreur à partir de laquelle il faut corriger peut être ici modifiée. Si le seuil est trop bas, le système de guidage réagit aux fluctuations dues au seeing, ce qui, comme pour la dynamique, peut conduire à une correction excessive. Cette valeur peut également être optimisée par incréments de dix.
Réduction de bruit :
Dans le cas d’étoiles guides de faible magnitude, on peut faire appel au binning de pixels. 2x2 ou 3x3 pixels peuvent être regroupés afin d’améliorer la valeur S/N. Mais, en même temps, la résolution diminue. Dans le cas d’une lunette guide d’une très courte distance focale, le pixel binning peut toutefois nuire à la qualité de la correction du suivi. Important : si l’on modifie ce réglage, un nouveau dark frame est nécessaire. Pour ce qui est des paramètres restants, on ne modifie généralement pas les réglages prédéfinis. Plus rien ne s’oppose désormais à ce que l’on obtienne des astrophotos correctement suivies et d’une longue exposition.
Auteur : Mario Weigand / Licence : Oculum-Verlag GmbH