
Come funziona l’autoguida?
I primi passi con PHD Guiding
Push Here, Dummy: muovere i primi passi con un un software per autoguida, per esempio il PHD Guiding.
 Sicuri nelle immagini a lunga esposizione: telescopio con autoguida in azione. Mario Weigand
Sicuri nelle immagini a lunga esposizione: telescopio con autoguida in azione. Mario Weigand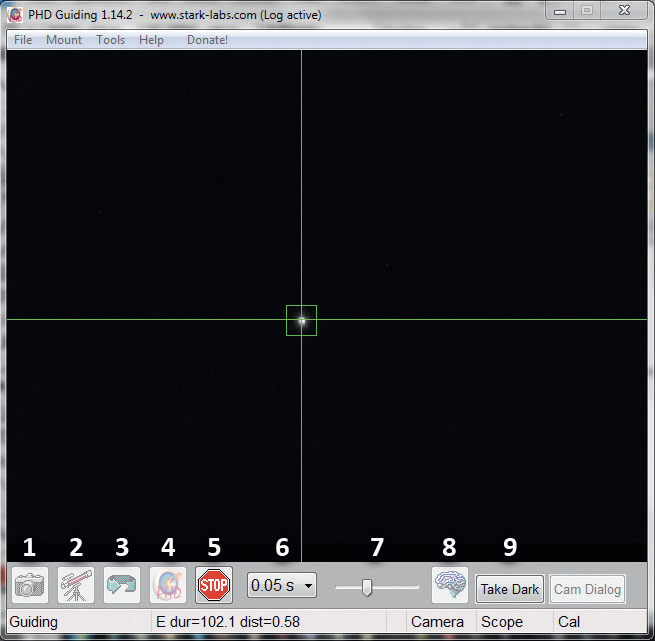 Immagine 2: la finestra principale di PHD con le funzionalità rilevanti. Mario Weigand
Immagine 2: la finestra principale di PHD con le funzionalità rilevanti. Mario WeigandQuesto articolo spiega come iniziare a usare un software per autoguida. Una soluzione gratuita è offerta dal programma PHD Guiding (Push Here, Dummy). Il suo funzionamento è particolarmente semplice e supporta in pratica tutte le più diffuse camere per inseguimento.
Questo programma ha una struttura semplice e permette quindi di muovere con facilità i primi passi in questo ambito. Dopo l’avvio appare la finestra del programma: le impostazioni di base sono accessibili tramite il menu standard. Qui si può vedere l'immagine corrente della fotocamera e la barra di controllo con le funzioni più importanti. Alla base di questa finestra troviamo una barra di stato, che mostra i messaggi importanti.
Impostazioni predefinite
Al primo utilizzo vanno impostati i collegamenti necessari con l’autoguida e con la montatura. Qui è importante che il PC o l’autoguida comunichino direttamente con la montatura tramite la porta ST-4. Nel secondo caso, dal menu alla voce “Mount” bisogna scegliere l’opzione “OnCamera”. Se si usa una montatura senza interfaccia ST-4, ma solo con interfaccia seriale (RS-232), il controllo avviene tramite driver ASCOM.
1. Stabilire il collegamento
Tramite i tasti 1 e 2 vengono stabiliti, in quest'ordine, i collegamenti alla camera di inseguimento o alla montatura. In caso di collegamento ASCOM si apre la finestra di dialogo corrispondente.
2. Preparare l'autoguida
Una volta stabilito il collegamento, il primo passo per preparare il sistema è la messa a fuoco dell’autoguida. Qui è utile aumentare il tempo di esposizione a cinque secondi, in modo che anche le stelle fortemente fuori fuoco diventino visibili. Successivamente, in modalità Loop (tasto 3) ci si avvicina in modo graduale e per tentativi alla posizione di messa a fuoco. Questa procedura può essere velocizzata per le volte successive, tramite un segno che indica la posizione di messa a fuoco sul focheggiatore.
Per l’inseguimento sono utili tempi di esposizione di circa un secondo. Una stella guida adeguata non deve essere troppo debole, ma nemmeno sovraesposta. La selezione manuale avviene semplicemente cliccando sulla stella desiderata. Nella barra di stato viene visualizzato un valore S/N che aiuta a valutare la stella guida, indicando quanto questa si distingue dal rumore di fondo. Sono consigliabili valori di 4,0 o superiori. Se non ci sono stelle guida a disposizione, il campo immagine può essere spostato usando gli anelli del tubo di guida, un eccentrico o una guida fuori asse.
Una volta trovata l’impostazione corretta, è necessario scattare un dark frame tenendo il coperchio sull’apertura dell’ottica di inseguimento (tasto 9), per correggere gli hotpixel. Questo dark frame viene sottratto in automatico da ogni immagine successiva. Quando si modifica il tempo di esposizione, è necessario produrre un nuovo dark frame. Nel caso in cui durante lo scatto qualcosa sia andato storto, il dark frame difettoso può essere eliminato tramite il menu “Tools/Erase Dark”.
3. Calibrazione
Prima di procedere con la correzione dell’inseguimento, l’autoguida deve essere calibrata. Questo significa che il PHD Guiding deve sapere come e quanto la montatura reagisce ai comandi di controllo. Se la modalità Loop è ancora attiva, ora verrà terminata. Facendo clic sul tasto 4 il software PHD Guiding avvia la calibrazione. I segnali di controllo vengono dati in entrambi gli assi uno dopo l'altro e si può osservare come la stella guida si muova lentamente.
La calibrazione può essere ottimizzata tramite il parametro “Calibration step” nelle impostazioni (tasto 8) in base alla lunghezza focale di inseguimento utilizzata. A 500 mm per esempio sono utili passi di calibrazione di 1000 ms, mentre con lunghezze focali maggiori di circa 2000 mm sono consigliabili passi più corti, di 250 ms.
Se la calibrazione ha avuto successo, il programma passa subito all’inseguimento. Nella barra di stato appare il messaggio “Guiding” e l’indicazione a forma di stella è verde.
4. Il processo di autoguida e le regolazioni di precisione
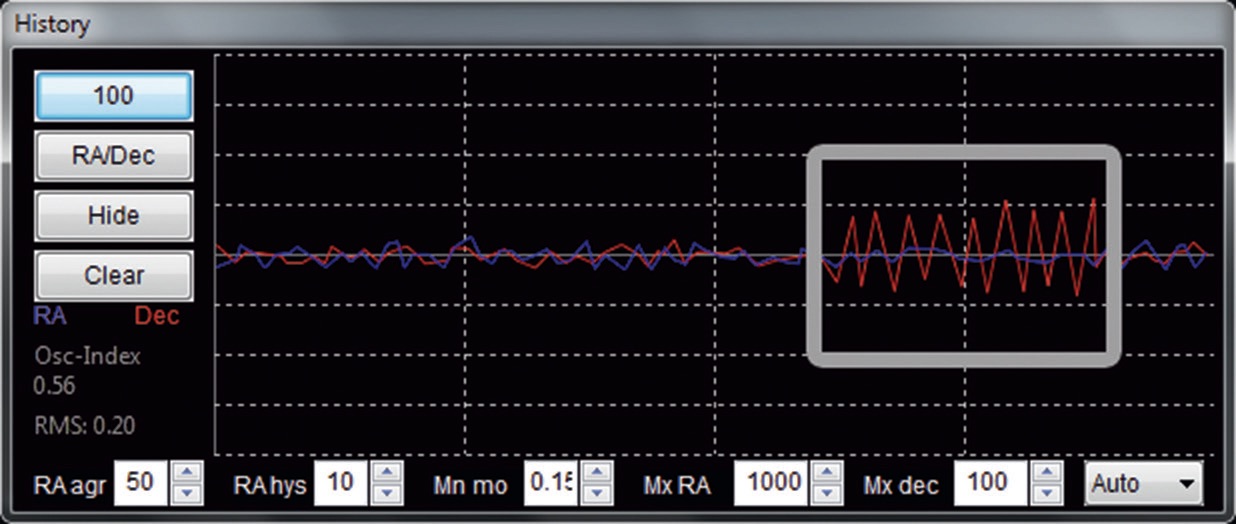 Immagine 3: diagramma di errore con inseguimento costante. La porzione a destra mostra una oscillazione in declinazione, dovuta a una impostazione di aggressività troppo alta. Mario Weigand
Immagine 3: diagramma di errore con inseguimento costante. La porzione a destra mostra una oscillazione in declinazione, dovuta a una impostazione di aggressività troppo alta. Mario WeigandIl funzionamento dell’inseguimento può essere controllato tramite i diagrammi degli errori, accessibili dal menu "Tools/Enable Graph". Un grafico blu e uno rosso mostrano le deviazioni in ascensione retta e declinazione.
Possibili problemi:
Può accadere che il programma perda stelle guida deboli. Lo si capisce da una indicazione a forma di stella gialla. In questo caso possono venire in aiuto solo stelle guida più luminose, tempi di esposizione maggiori o il parametro “Noise reduction” (vedi sotto).
Se la correzione dell’inseguimento non funziona a dovere, con il tempo la stella si sposta dalla posizione target. Il software PHD Guiding lo segnala con un messaggio di avvertimento in rosso.
Causa frequente è un collegamento via cavo difettoso con la montatura, oppure un gioco eccessivo degli ingranaggi.
Inoltre, esistono alcuni importanti parametri, raggiungibili tramite il tasto 8, che influiscono sulla qualità della correzione dell’inseguimento. Bisogna aggiungere che non esistono parametri universalmente corretti. Le impostazioni ottimali devono essere trovate individualmente per ogni singolo telescopio. Le seguenti indicazioni possono essere utili:
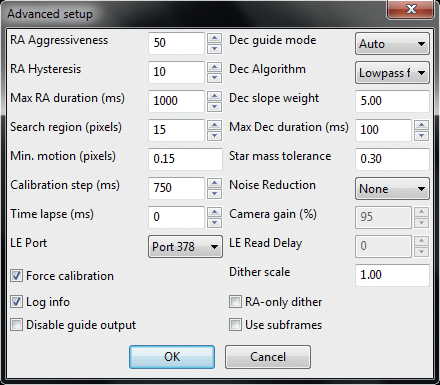 Immagine 4: finestra delle impostazioni avanzate. Mario Weigand
Immagine 4: finestra delle impostazioni avanzate. Mario WeigandAggressività AR:
L’aggressività indica in quale misura il programma deve reagire a un errore di inseguimento. Per una ottimizzazione a tal proposito si osserva il diagramma degli errori. Se l’aggressività è troppo bassa, l’autoguida impiegherà troppo tempo per centrare nuovamente la stella guida dopo un errore di inseguimento. Il valore deve poi essere aumentato in passi da dieci. Se il valore è troppo alto, si ottiene al contrario una correzione eccessiva – la stella “oscilla” attorno alla posizione target (vedi immagine 3). Bisogna anche considerare l’interazione con l’isteresi descritta qui di seguito!
Isteresi AR:
L'isteresi è una soglia di reazione. Permette di modificare il valore di errore minimo a partire dal quale deve essere effettuata la correzione. Se la soglia è troppo bassa, il sistema di guida reagisce alle fluttuazioni dovute al seeing, il che può portare a una correzione eccessiva simile all'aggressività. Anche questo valore è ottimizzabile in passi da dieci.
Riduzione del rumore:
Con le stelle guida deboli, il pixel binning torna utile. Consiste nel combinare pixel 2×2 o 3×3 per migliorare il valore S/N. Allo stesso tempo, però, la risoluzione diminuisce. Ma con un cannocchiale guida di lunghezza focale molto corta, il pixel binning può anche peggiorare la qualità della correzione dell'inseguimento. Importante: se si modifica questa impostazione, è necessario un nuovo dark frame! Per quanto riguarda i restanti parametri, di solito le impostazioni predefinite non vengono modificate. Ora non c'è più nulla che impedisca di ottenere foto astronomiche a lunga esposizione e con inseguimento corretto!
Autore: Mario Weigand / Su gentile concessione di: Oculum-Verlag GmbH